




როგორც გადაცემის მექანიზმი, პლანეტარული გადაცემათა კოლოფი ფართოდ გამოიყენება სხვადასხვა საინჟინრო პრაქტიკაში, როგორიცაა გადაცემათა კოლოფის რედუქტორი, ამწე, პლანეტარული გადაცემათა კოლოფის რედუქტორი და ა.შ. პლანეტარული გადაცემათა კოლოფის შემთხვევაში, მას შეუძლია მრავალ შემთხვევაში შეცვალოს ფიქსირებული ღერძიანი გადაცემათა კოლოფის გადაცემის მექანიზმი. რადგან გადაცემათა კოლოფის გადაცემის პროცესი ხაზოვან კონტაქტშია, ხანგრძლივი შეერთება გამოიწვევს გადაცემათა კოლოფის უკმარისობას, ამიტომ აუცილებელია მისი სიმტკიცის სიმულირება. ლი ჰონგლიმ და სხვებმა გამოიყენეს ავტომატური შეერთების მეთოდი პლანეტარული გადაცემათა კოლოფის შესაერთებლად და დაადგინეს, რომ ბრუნვის მომენტი და მაქსიმალური დაძაბულობა წრფივია. ვანგ იანჯუნმა და სხვებმა ასევე დააკავშირეს პლანეტარული გადაცემათა კოლოფი ავტომატური გენერაციის მეთოდით და მოახდინეს პლანეტარული გადაცემათა კოლოფის სტატიკისა და მოდალური სიმულაციის სიმულირება. ამ ნაშრომში, ტეტრაედრონული და ექვსკუთხა ელემენტები ძირითადად გამოიყენება ბადის გასაყოფად და საბოლოო შედეგები გაანალიზებულია იმის დასადგენად, დაკმაყოფილებულია თუ არა სიმტკიცის პირობები.
1. მოდელის შექმნა და შედეგების ანალიზი
პლანეტარული მექანიზმის სამგანზომილებიანი მოდელირება
პლანეტარული მექანიზმიძირითადად შედგება რგოლური, მზის და პლანეტარული მექანიზმებისგან. ამ ნაშრომში შერჩეული ძირითადი პარამეტრებია: შიდა რგოლის კბილების რაოდენობაა 66, მზის მექანიზმის კბილების რაოდენობაა 36, პლანეტარული მექანიზმის კბილების რაოდენობაა 15, შიდა რგოლის გარე დიამეტრია 150 მმ, მოდული არის 2 მმ, წნევის კუთხეა 20°, კბილის სიგანეა 20 მმ, დანართის სიმაღლის კოეფიციენტია 1, უკუქცევის კოეფიციენტია 0.25 და არსებობს სამი პლანეტარული მექანიზმი.
პლანეტარული მექანიზმის სტატიკური სიმულაციური ანალიზი
მასალის თვისებების განსაზღვრა: UG პროგრამულ უზრუნველყოფაში დახატული სამგანზომილებიანი პლანეტარული გადაცემათა სისტემა ANSYS-ში შეიტანეთ და მასალის პარამეტრები დააყენეთ, როგორც ეს ქვემოთ მოცემულ ცხრილ 1-შია ნაჩვენები:

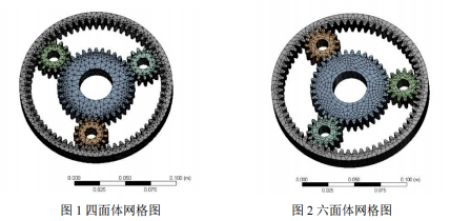
ბადისებრი კონსტრუქცია: სასრული ელემენტების ბადე იყოფა ტეტრაედრონსა და ექვსეედრონზე, ხოლო ელემენტის ძირითადი ზომაა 5 მმ. ვინაიდანპლანეტარული მექანიზმი, მზის მექანიზმი და შიდა მექანიზმის რგოლი კონტაქტშია და ბადეა, კონტაქტისა და ბადის ნაწილების ბადე გამკვრივებულია და ზომა 2 მმ-ია. პირველ რიგში, გამოიყენება ტეტრაედრული ბადეები, როგორც ეს ნაჩვენებია ნახაზ 1-ზე. სულ გენერირებულია 105906 ელემენტი და 177893 კვანძი. შემდეგ, როგორც ეს ნაჩვენებია ნახაზ 2-ზე, გამოყენებულია ექვსკუთხა ბადე და სულ გენერირებულია 26957 უჯრედი და 140560 კვანძი.
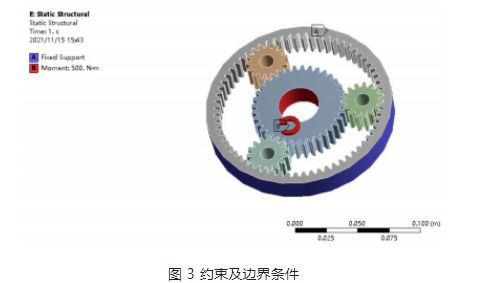
დატვირთვის გამოყენება და სასაზღვრო პირობები: რედუქტორში პლანეტარული მექანიზმის სამუშაო მახასიათებლების მიხედვით, მზის მექანიზმი არის მამოძრავებელი მექანიზმი, პლანეტარული მექანიზმი არის ამოძრავებული მექანიზმი და საბოლოო გამომავალი სიგნალი გადის პლანეტარული მატარებლის გავლით. დააფიქსირეთ შიდა მექანიზმის რგოლი ANSYS-ში და მზის მექანიზმზე გამოიყენეთ 500N · m ბრუნვის მომენტი, როგორც ეს ნაჩვენებია ნახაზ 3-ზე.
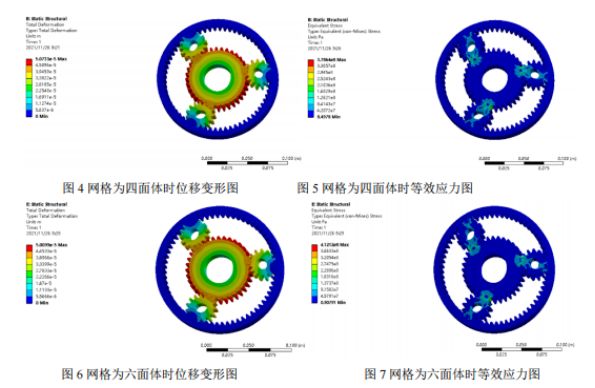
შემდგომი დამუშავება და შედეგების ანალიზი: ქვემოთ მოცემულია ორი ბადისებრი დაყოფიდან მიღებული სტატიკური ანალიზის გადაადგილების ნეფოგრამა და ეკვივალენტური დაძაბულობის ნეფოგრამა, ასევე ჩატარებულია შედარებითი ანალიზი. ორი სახის ბადის გადაადგილების ნეფოგრამიდან დადგინდა, რომ მაქსიმალური გადაადგილება ხდება იმ პოზიციაში, სადაც მზის მექანიზმი არ ერწყმის პლანეტარულ მექანიზმს, ხოლო მაქსიმალური დატვირთვა ხდება მექანიზმის ბადის ძირში. ტეტრაედრული ბადის მაქსიმალური დატვირთვაა 378 მპა, ხოლო ექვსკუთხა ბადის მაქსიმალური დატვირთვაა 412 მპა. რადგან მასალის დენადობის ზღვარი არის 785 მპა და უსაფრთხოების კოეფიციენტია 1.5, დასაშვები დატვირთვაა 523 მპა. ორივე შედეგის მაქსიმალური დატვირთვა ნაკლებია დასაშვებ დატვირთვაზე და ორივე აკმაყოფილებს სიმტკიცის პირობებს.
2. დასკვნა
პლანეტარული მექანიზმის სასრული ელემენტების სიმულაციის მეშვეობით მიიღება მექანიზმის გადაადგილების დეფორმაციის ნეფოგრამა და ეკვივალენტური დაძაბულობის ნეფოგრამა, საიდანაც მიიღება მაქსიმალური და მინიმალური მონაცემები და მათი განაწილება.პლანეტარული მექანიზმიმოდელის პოვნა შესაძლებელია. მაქსიმალური ეკვივალენტური დაძაბულობის ადგილმდებარეობა ასევე არის ის ადგილი, სადაც გადაცემათა კოლოფის კბილები ყველაზე მეტად სავარაუდოა, რომ გაფუჭდეს, ამიტომ განსაკუთრებული ყურადღება უნდა მიექცეს მას დიზაინის ან წარმოების დროს. პლანეტარული გადაცემათა კოლოფის მთელი სისტემის ანალიზით, აღმოიფხვრება მხოლოდ ერთი გადაცემათა კოლოფის ანალიზით გამოწვეული შეცდომა.
გამოქვეყნების დრო: 2022 წლის 28 დეკემბერი